2022年1月25日(火)~27日(木)オンライン開催された7th International Symposium on Artificial Life and Robotics(AROB 27th 2022)にて、機械工学専攻 博士前期課程1年生 徐 齊焄さん(山崎 芳昭研究室)が、査読採択された講演論文を口頭発表しました。27回目の開催となるこの国際会議は、コンピュータをベースにした人工生命やロボット工学に関する新技術の開発について、独自の研究を発表し、議論するための国際会議です。(基調講演11件、口頭発表384件、参加者539名、11ヶ国)
タイトル
「Object recognition by RealSenseD435 using ROS and object holding with 6 DoF manipulator」
(ROSを使用したRealSenseD435によるオブジェクト認識と6自由度マニピュレータによるオブジェクト保持)
発表者
Jaefun Seo, and Yoshiaki Yamazaki
研究内容
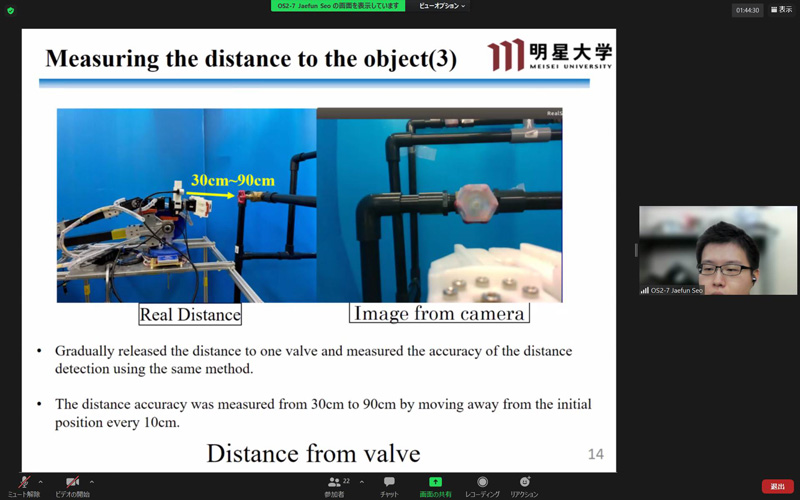
災害救援ロボットは、被災地で瓦礫に埋もれた犠牲者を探すために、手元にカメラを備えたマニピュレーターを装備し、対象物との距離情報を把握することが重要です。そこで、6自由度マニピュレーターに深度カメラIntel RealSenseD435を接続し、制御にROS(Robot Operating System)、バルブ認識のツールとして処理速度と精度が高いSingle Shot multibox DitectorとTensorFlowを使用しました。本研究では、深度カメラから取得した距離情報をマニピュレーターの制御系に送信するために、ワンクリックでバルブを自動的に認識して回転させる方法を提案しました。 実験の結果、バルブの形状が複雑なため、取得した距離情報に大きな誤差が生じるケースを明らかにしました。また、RGBカメラと深度カメラの位置の違いによる投影されたカメラ画像と深度画像の位置ずれ、取得した座標や距離情報に生じる誤差について評価したものです。