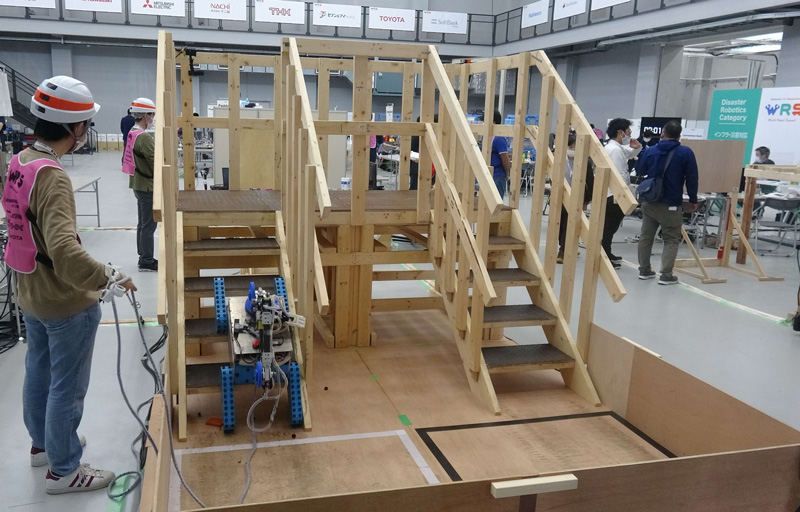
機械工学系 山崎 芳昭研究室では、地震災害等で倒壊家屋の瓦礫の下に残された被災者の発見補助やプラントなどの危険箇所でのバルブ開閉操作をする目的で、遠隔操縦型のレスキューロボットとロボットアームを研究開発しています。
2021年10月6日(水)から開催された「World Robot Summit 2020 福島大会」の「インフラ・災害対応カテゴリー 災害対応標準性能評価チャレンジ」部門の審査を通過し、学生6名と指導教員で大会に参加しました。決勝進出の上位3チームには残れませんでしたが、奨励賞を受賞し12月に賞状と賞牌をいただきました。