【理工学研究科】機械工学専攻の大学院生が国際シンポジウムIEEE/SSRR2019で研究発表しました
【理工学部支援室】
2019年9月1日(日)~4日(水)、ユリウス・マクシミリアン大学ヴュルツブルク大学院(ドイツ)で開催されたIEEE Robotics&Automation Society主催「IEEE INTERNATIONAL SYMPOSIUM ON SAFETY, SECURITY AND RESCUE ROBOTICS (SSRR2019) 」にて、機械工学専攻 博士前期課程2年生 萩原 颯人さん(山崎 芳昭研究室)が、6月に査読採択された講演論文を口頭発表しました。17回目の開催となるこの国際シンポジウムは、世界各国からレスキューロボット工学研究者が集まる著名なシンポジウムです。(基調講演4件、口頭発表45件、ポスター発表9件、13ヶ国参加)
さらに、ユリウス・マクシミリアン大学内のロボティクス関連の研究室、および、ヴュルツブルク州消防局消防学校の見学会にも参加しました。5つの研究室を訪問し最先端のUAV(ドローン)の実演や各種レスキューロボット研究の説明を受けるとともに、研究者と情報交換することで最新のロボット研究について知見を広めることができました。
研究発表について
タイトル
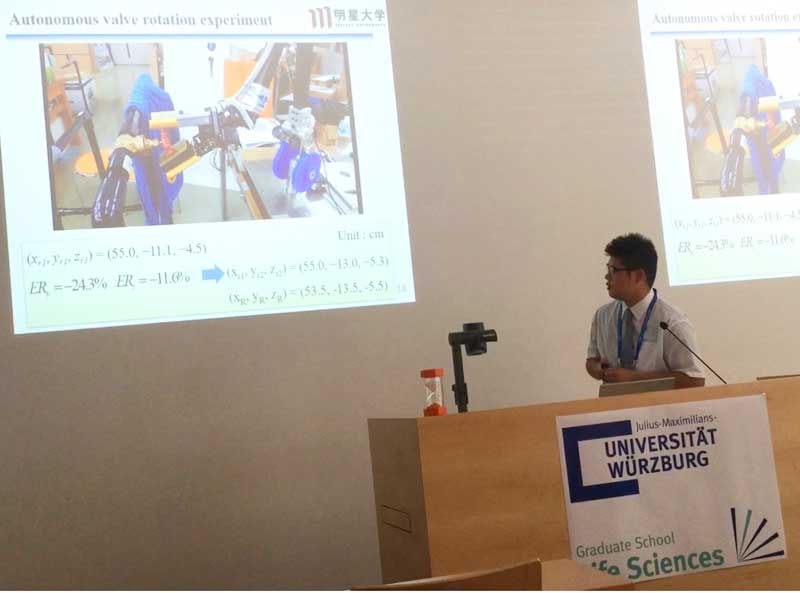
「Autonomous valve operation by a manipulator using a monocular camera and a single shot multibox detector」
(単眼カメラとシングルショットマルチボックス検出器を使用したマニピュレーターによる自律的なバルブ操作)
発表者
Hayato Hagiwara and Yoshiaki Yamazaki
研究内容
レスキューロボットに搭載可能なマニピュレータを開発し、プラントにおけるバルブの半自律的な回転操作を目的に、AIを活用したバルブの自動認識と、単眼カメラによる距離計測について新たな手法を提案しました。AIの活用により求めたバルブの座標にROS(Robot Operation System)を使用して構築した操縦システムにより、ロボットアーム手先部の自動移動を実現しました。さらに、バルブを自律回転操作する実験を行い、位置精度等を評価することでその有用性を明らかにしています。